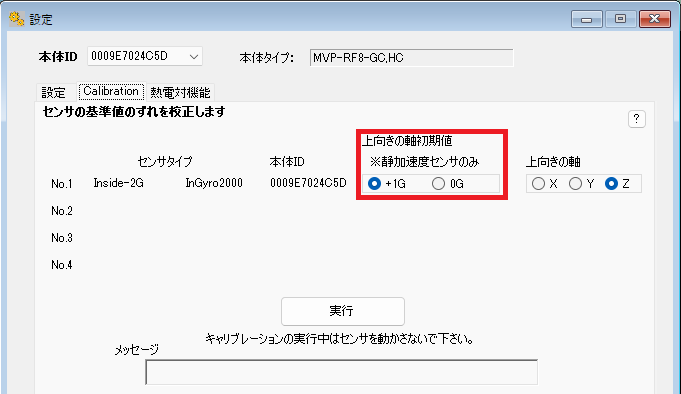
上記製品の計測ソフトウェアのキャリブレーション画面では、下記画面のように、キャリブレーションが「+1G」と「0G」の2通りでできるようになっております。
(※機種によって「重力加味する」「重力加味しない」という表現のものもございます。)
地球上の物体は重力により地球に引っ張られている状態です。
重力によって地面と鉛直方向に重力加速度がかかり続けている状態となっていますが、静電容量型の加速度センサーはこの重力加速度を検出できるという特性を持っております。
静電容量型の加速度センサーを搭載しているマイクロストーン製品は下記の図の通りです。
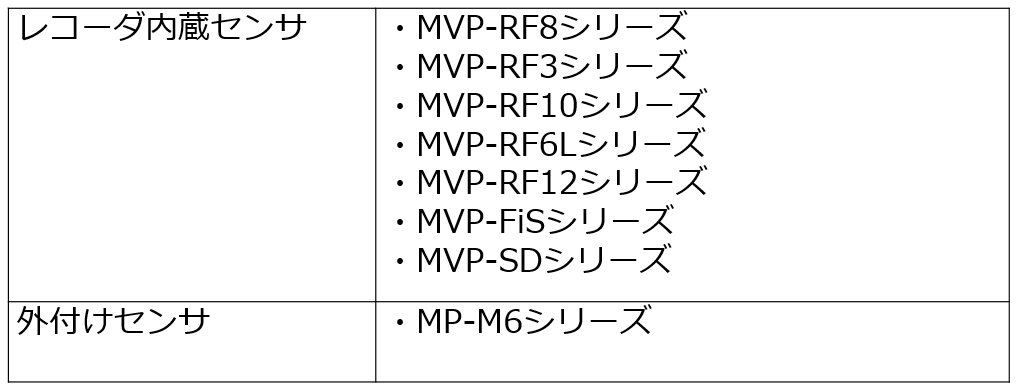
上記のマイクロストーン製品のソフトウェアでは静電容量型のセンサーでの計測時に重力加速度を加味するかしないかを選択できるようになっております。
0G(重力加味しない)でのキャリブレーション
キャリブレーションをした時の設置角度状態を基準(加速度「0」)とします。
→取り付けが地球に重力面に対しナナメになっていても、キャリブレーションした際の出力を「0」とします。
<注意点>
キャリブレーションはセンサを計測部取り付けた状態で行ってください。
<0Gのキャリブレーションが推奨される場面>
- 機械の振動成分を検出したい場合
- 人体の「動揺成分」を検出したい場合
+1G(重力加味する)でのキャリブレーション
重力加速度が出力に加味され、重力座標系におけるセンサの「傾斜角度」が算出できます。
<注意点>
キャリブレーションはセンサを平らな台の上に「上向きの軸」で設定した軸を上向きになるように置いて静止させて行ってください。
<+1Gのキャリブレーションが推奨される場面>
- 多関節ロボット、人間の関節の動きなど、動作時の姿勢・角度の変化を検出したい場合
なお参考までに、圧電型加速度センサ(MA3シリーズ)は、センサを静止させてキャリブレーションをすれば、設置向きは不問です。
(静電容量型加速度センサの「0G」と同じようなキャリブレーションとなります。)